Details about the project.On this page we are presenting some details about our project
|
System ArchitectureThe proposed system is built around the mechatronic interchange-able subsystem and a video camera that is overlooking it for position feedback.
One configuration is shown below, it has 2 DoF and it is a serial arm structure. 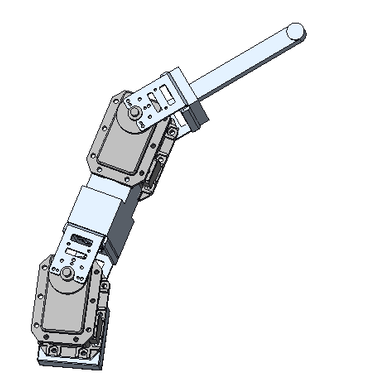
To design this structure we used CREO, a CAD software frequently used in industrial environments.
For the construction of the system we used 2 DYNAMIXEL RX-24F servomotors and connection brackets provided by DYNAMIXEL. There were some custom designed parts which were manufactured using 3D Printing technology on a Symme3D Machine. The whole system is controlled through a Laptop PC. In the next image are presented Photographs of the resulted system 


There were made some tests for tracking of the arm-endpoint, the resulting video is shown below
|
